Class Structure¶
j5 has a somewhat abstract nature due to the number of things that it can support. It is not necessary for the average developer or student to understand everything that is going on here.
Basic Structure¶
The following diagram shows the main classes at a very basic level, with their inheritance.
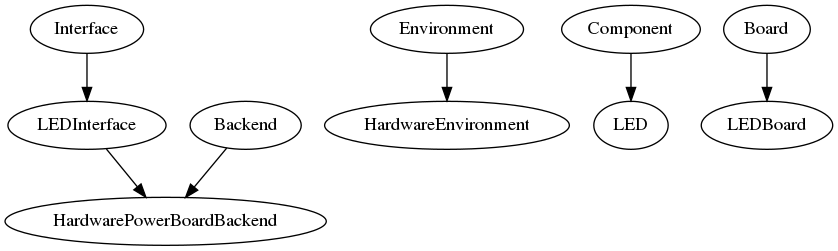
The only thing that looks out of place in the above diagram is HardwarePowerBoardBackend, which inherits from both
LEDInterface and Backend. Unlike some other object oriented programming languages, such as Java, Python
has support for a class to inherit from multiple other classes. You can read more here.
Initially this may seem a bit unintuitive, but we are making use of multiple inheritance in order to create an interface for each component. As interfaces don’t otherwise exist in Python, we have had to re-create them for j5.
Structure with Meta-classes¶
Metaclasses are one of the more useful and advanced features of Python and they are instrumental to some of the more clever features that j5 has. The below class diagram has metaclasses added.
![digraph {
Interface -> LEDInterface
{LEDInterface, Backend} -> HardwarePowerBoardBackend
Environment -> HardwareEnvironment
Component -> LED
Board -> LEDBoard
ABCMeta -> BackendMeta
BackendMeta -> Backend [style=dashed]
ABCMeta -> {Board, Environment, Component, Interface} [style=dashed]
}](../_images/graphviz-860bc044383cfa205856679f125a0397a23a0a67.png)
You can view more details about BackendMeta in its documentation. ABCMeta is part of the Python abc library.
Structure with Attributes¶
The below diagram shows a class having instances of another class as an attribute with a dotted line.
![digraph {
Interface -> LEDInterface
{LEDInterface, Backend} -> HardwarePowerBoardBackend
Environment -> HardwareEnvironment
Component -> LED
Board -> PowerBoard
HardwarePowerBoardBackend -> {HardwareEnvironment, PowerBoard} [style=dotted]
PowerBoard -> LED [style=dotted]
Board -> PowerBoard [style=dotted]
BoardGroup -> PowerBoard [style=dotted]
LED -> LEDInterface [style=dotted]
Robot -> {BoardGroup, PowerBoard} [style=dotted]
}](../_images/graphviz-950eb5ecf3ffbc03fc5a04cf3d06d46a4370a1ba.png)
Here we can see how the control flow of the robot is not immediately obvious, but also how we can easily swap out the modular components within the class structure to support different hardware and environments.
Complete Structure¶
This diagram may occasionally be useful, and contains the entire class structure for a single board and component.
![digraph {
Interface -> LEDInterface
{LEDInterface, Backend} -> HardwarePowerBoardBackend
Environment -> HardwareEnvironment
Component -> LED
Board -> PowerBoard
ABCMeta -> BackendMeta
BackendMeta -> Backend [style=dashed]
HardwarePowerBoardBackend -> {HardwareEnvironment, PowerBoard} [style=dotted]
PowerBoard -> LED [style=dotted]
Board -> PowerBoard [style=dotted]
BoardGroup -> PowerBoard [style=dotted]
LED -> LEDInterface [style=dotted]
Robot -> {BoardGroup, PowerBoard} [style=dotted]
}](../_images/graphviz-e951b2b020036e25749d8623aad4bc50f359fd20.png)